Radarové snímače pro měření vzdálenosti
Baumer

BAUMER

| Foto | Produkt (15) | Výstup/Rozhraní | Typ připojení | Skladová dostupnost |
|---|---|---|---|---|
 | R600V.DAE0-11188367 - Off-Highway radar sensor for ground and crop distance Obj. číslo: 11188367 | CAN (5 V), CAN SAE J1939 | Konektor | na dotaz |
 | R600V.DAE0-11209335 - Off-Highway radar sensor for ground and crop distance (for sprayer applications) Obj. číslo: 11209335 | CAN (5 V), CAN SAE J1939 | Konektor | na dotaz |
 | R600V.DAH5-11205779 - Off-Highway radar sensor Obj. číslo: 11205779 | CAN (5 V), CAN SAE J1939 | Konektor | na dotaz |
 | R600V.DAH5-11221283 - Off-Highway multi-object radar sensor Obj. číslo: 11221283 | CAN (5 V), CAN SAE J1939 | Konektor | na dotaz |
 | RR30.DAF0-GGPI.9VF/E029 Obj. číslo: 11220109 | IO-Link | Konektor | na dotaz |
 | RR30.DAF0-IGPI.9CF/E029_P043 Obj. číslo: 11230002 | Proudový | Konektor | na dotaz |
 | RR30.DAF0-IGPI.9VF/E029 Obj. číslo: 11220108 | Proudový | Konektor | 1 ks |
 | RR30.DAH5-IGPB.9VF Obj. číslo: 11167317 | Proudový | Konektor | na dotaz |
 | RR30.DAJ2-GGPI.9VF Obj. číslo: 11221309 | IO-Link | Konektor | na dotaz |
 | RR30.DAJ2-IGPI.9CF/P043 Obj. číslo: 11230003 | Proudový | Konektor | na dotaz |
 | RR30.DAJ2-IGPI.9VF Obj. číslo: 11221333 | Proudový | Konektor | na dotaz |
 | RR30.DAM0-IGPB.9VF Obj. číslo: 11168232 | Proudový | Konektor | 1 ks |
 | RR30.DAM0-UGPB.9VF Obj. číslo: 11168234 | Napěťový push-pull | Konektor | na dotaz |
 | RR30.DAO0-GGPI.9VF Obj. číslo: 11221320 | IO-Link | Konektor | na dotaz |
 | RR30.DAO0-IGPI.9VF Obj. číslo: 11221321 | Proudový | Konektor | 1 ks |
Přesné a stabilní měření vzdálenosti i v nejextrémnějších podmínkách.
Radarové měřící snímače Baumer přesně a stabilně měří vzdálenost i v nejextrémnějších podmínkách jako jsou nízké či vysoké teploty (-40...70 °C) a nebo vysoká vlhkost prostředí (IP68 / IP69K a proTect +). Rozsah měření až 40 m, extrémně krátké reakční doby
Výhody radarových snímačů Baumer
- Stabilní a spolehlivý měřicí signál i za nepříznivých podmínek, při silném okolním světle a znečištění.
- Vysoká opakovatelnost a přesnost měření v celém rozsahu s omezeným teplotním posunem.
- Možnost venkovního použití a široký teplotní rozsah od -40 do 80 °C, i bez dodatečného ochranného krytu.
- Senzor bez problémů zvládá zátěžové testy podle IP68 / IP69K i náročnější koncept neproputnosti Baumer proTect+.
- Jednoduché a přesné nastavení podle různých aplikačních požadavků.
- Rozšířená funkčnost přes rozhraní IO-Link.
- Uživatelsky přívětivé rozhraní s vizualizací měřených dat.
Aplikace
Radarová technologie je obzvlášť vhodná pro mobilní stroje a venkovní aplikace, např. v zemědělství, stavebnictví nebo v přístavech.
- Polohování a měření vozidel v mycích linkách a parkovacích systémech.
- Detekce polohy jeřábových mostů, jeřábových vozíků a transportních vozíků.
- Monitorování pro prevenci kolizí u jeřábů nebo automatizovaných systémů.
- Detekce a polohování velkých pohybujících se objektů (např. vlaků).
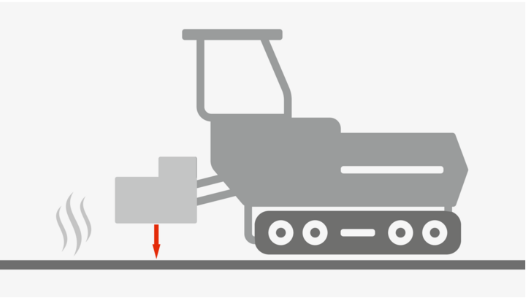
- Měření světlé výšky nad povrchem půdy nebo vozovky (např. asfaltu).
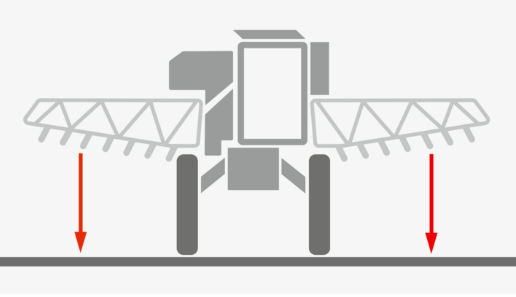
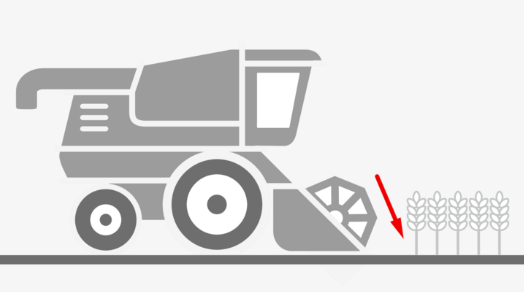
- Řízení výšky závěsů postřikovačů a zařízení sklízecích mlátiček.
- Měření hladiny v otevřených nebo uzavřených nádržích, i pod tlakem.
.
Technologie
Měření vzdálenosti k plochým nebo kruhovým objektům
U plochých objektů je velmi důležité, aby sklon povrchu nebyl větší než polovina vyzařovacího úhlu senzoru. Jen tak se zajistí, že se radarové paprsky odražené od povrchu vrátí zpět do senzoru a umožní správnou detekci.
Kruhové objekty mají výhodu rotační symetrie, díky které je jejich zarovnání výrazně jednodušší – vždy totiž odrážejí část signálu zpět k senzoru. Ve srovnání s plochým objektem obdobné velikosti je však intenzita odraženého signálu nižší.
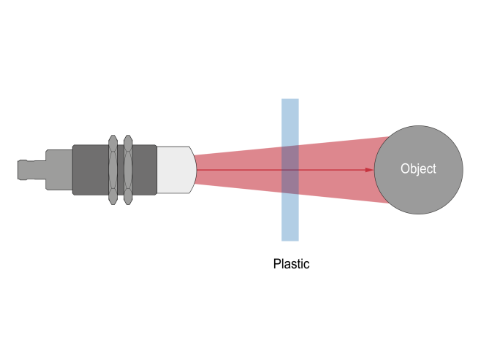
Měření vzdálenosti skrz kryt
Radarové paprsky dokážou pronikat některými materiály (například plastovými deskami). Kryty přitom nemusí být zcela průhledné – radar může procházet i například černými plastovými deskami.
Malá část radarového signálu se od krytu odráží zpět do senzoru. Pomocí speciálního teach-in algoritmu se senzor naučí charakteristiku tohoto odrazu a následně měří objekty za krytem, jako by kryt vůbec neexistoval.
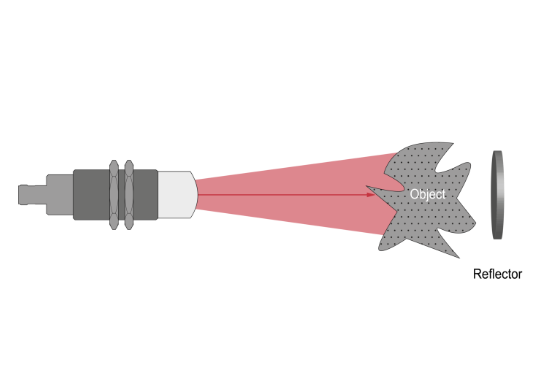
Radarová závora pro maximálně spolehlivou detekci objektů
Radarový senzor je k dispozici také v konfiguraci, ve které funguje podobně jako optická závora. Pomocí speciálního teach-in algoritmu se senzor naučí polohu reflektoru. Po naučení následně tuto polohu neustále monitoruje.
Pokud objekt přeruší přímou linii mezi senzorem a reflektorem, dojde k sepnutí výstupu senzoru. Výhodou této konfigurace je, že objekt nemusí odrážet signál zpět k senzoru – díky tomu lze spolehlivě detekovat i nepravidelně tvarované nebo radar pohlcující objekty.